-
1 автоматизированная система управления
- MIS
- management information system
- computerized control system
- automatized management system
- automatized control system
- automated data management system
- automated controlling system
- automated control system
- automated
- ACS
автоматизированная система, управляющая
АСУ
Управляющая система, часть функций которой, главным образом функцию принятия решений, выполняет человек-оператор.
Примечание
В зависимости от объектов управления различают, например: АСУ П, когда объектом управления является предприятие; АСУ ТП, когда объектом управления является технологический процесс; ОАСУ, когда объектом управления является организационный объект или комплекс.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]
автоматизированная система управления
АСУ
Совокупность математических методов, технических средств (компьютеров, средств связи, устройств отображения информации и т. д.) и организационных комплексов, обеспечивающих рациональное управление сложным объектом (процессом) в соответствии с заданной целью. АСУ принято делить на основу и функциональную часть. В основу входят информационное, техническое и математическое обеспечение. К функциональной части относят набор взаимосвязанных программ, автоматизирующих конкретные функции управления (планирование, финансово-бухгалтерскую деятельность и др.). Различают АСУ объектами (технологическими процессами - АСУТП, предприятием - АСУП, отраслью - ОАСУ) и функциональными автоматизированными системами, например, проектирования, расчетов, материально-технического и др. обеспечения.
[ http://www.morepc.ru/dict/]
автоматизированная система управления
АСУ
Система управления, в которой применяются современные автоматические средства обработки данных и экономико-математические методы для решения основных задач управления производственно-хозяйственной деятельностью. Это человеко-машинная система: в ней ряд операций и действий передается для исполнения машинам и другим устройствам (особенно это относится к так называемым рутинным, повторяющимся, стандартным операциям расчетов), но главное решение всегда остается за человеком. Этим АСУ отличаются от автоматических систем, т.е. таких технических устройств, которые действуют самостоятельно, по установленной для них программе, без вмешательства человека. АСУ подразделяются прежде всего на два класса: автоматизированные системы организационного управления и автоматизированные системы управления технологическими процессами (последние часто бывают автоматическими, первые ими принципиально быть не могут). Традиционно термин АСУ закрепился за первым из названных классов. Отличие АСУ от обычной, неавтоматизированной, но также использующей ЭВМ, системы управления показано на рис. А.1, а, б. Стрелками обозначены потоки информации. В первом случае компьютер используется для решения отдельных задач управления, например для производства плановых расчетов, результаты которых рассматриваются органом управления и либо принимаются, либо отвергаются. При этом необходимые данные собираются специально для решения каждой задачи и вводятся в компьютер, а потом за ненадобностью уничтожаются. Во втором случае существенная часть информации от объекта управления собирается непосредственно вычислительным центром, в том числе по каналам связи. При этом нет необходимости каждый раз вводить в компьютер все данные: часть из них (цены, нормативы и т. п.) хранится в ее запоминающем устройстве. Из вычислительного центра выработанные задания поступают, с одной стороны, в орган управления, а с другой (обычно через контрольное звено) — к объекту управления. В свою очередь информация, поступающая от объекта управления, влияет на принимаемые решения, т.е. здесь используется кибернетический принцип обратной связи. Это — АСУ. Принято рассматривать каждую АСУ одновременно в двух аспектах: с точки зрения ее функций — того, что и как она делает, и с точки зрения ее схемы, т.е. с помощью каких средств и методов эти функции реализуются. Соответственно АСУ подразделяют на две группы подсистем — функциональные и обеспечивающие. Создание АСУ на действующем экономическом объекте (в фирме, на предприятии, в банке и т.д.) — не разовое мероприятие, а длительный процесс. Отдельные подсистемы АСУ проектируются и вводятся в действие последовательными очередями, в состав функций включаются также все новые и новые задачи; при этом АСУ органически «вписывается» в систему управления. Обычно первые очереди АСУ ограничиваются решением чисто информационных задач. В дальнейшем их функции усложняются, включая использование оптимизационных расчетов, элементов оптимального управления. Степень участия АСУ в процессах управления может быть весьма различной, вплоть до самостоятельной выдачи компьютером, на основе получаемых им данных, оперативных управляющих «команд». Поскольку внедрение АСУ требует приспособления документации для машинной обработки, создаются унифицированные системы документации, а также классификаторы технико-экономической информации и т.д. Экономическая эффективность АСУ определяется прежде всего ростом эффективности самого производства в результате лучшей загрузки оборудования, повышения ритмичности, сокращения незавершенного производства и других материальных запасов, повышения качества продукции. РисА.1. Системы управления с использованием компьютеров а — неавтоматизированная, б — автоматизированная; I — управляющий центр; II — автоматизированная управляемая система (например, производство), III — контроль; тонкая черная стрелка — канал непосредственного управления компьютером некоторыми технологическими процессами (бывает не во всех АСУ); тонкая пунктирная стрелка показывает ту часть информации, которая поступает непосредственно в центр, минуя компьютер.
[ http://slovar-lopatnikov.ru/]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > автоматизированная система управления
-
2 протокол управления простой сетью
протокол управления простой сетью
Протокол, управляющий сетью, сетевыми устройствами и их функциями.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]
простой протокол сетевого управления
Прикладной протокол (L7) управления сетевыми устройствами. Основное предназначение состоит в получении подробной информации о состоянии устройства и изменении его конфигурации в автоматическом режиме. Помимо периодического считывания SNMP-сервером информации с устройства, возможна активная сигнализация самим устройством о произошедших событиях.
[ http://www.morepc.ru/dict/]
простой протокол управления сетью
Протокол группы IETF по управлению сетью. Основной протокол администрирования сетей TCP/IP, обеспечивающий мониторинг и контроль сетевых устройств, обслуживание их конфигураций, сбор статистических данных, замеры производительности и проверку безопасности (МСЭ-Т Х.805; МСЭ-Т J.116).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Вопросы сетевого управления традиционно входят в число основных как для производителей программ и оборудования, так и для организаций, занимающихся разработкой стандартов. Невероятно высокий темп развития сетей на базе протокола TCP/IP (и Internet в частности) и движение в сторону создания единой информационной магистрали обусловили необходимость разработки стандартного протокола управления устройствами по сети и множества высокоуровневых продуктов, которые его используют.
Протокол управления сетями определяет стандартный метод контроля какого-либо устройства со станции управления с целью определения его состояния, настроек и иной информации, а также ее модификации. Основным протоколом управления, используемым в семействе TCP/IP, является протокол SNMP (Simple Network Management Protocol простой протокол управления сетью). Сам протокол очень прост: он определяет только иерархическое пространство имен объектов управления и способ чтения (или записи) данных этих объектов на каждом узле. Основное преимущество этого протокола заключается в том, что он позволяет единообразным образом управлять всеми типами аппаратных средств, независимо от их назначения и особенностей. Все они говорят на одном языке и могут опрашиваться и конфигурироваться с центральной станции.
Однако, SNMP не более чем протокол, поддерживающий диалог двух сторон. Для его использования необходимы две составляющие: программа-агент, работающая на сетевом устройстве, и программа-менеджер, позволяющая дистанционно отслеживать и управлять сетевыми устройствами. Способ ведения диалога между агентом и менеджером показан на рис.1.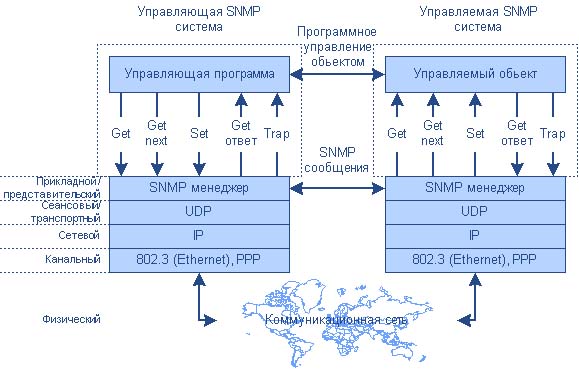
Рис. 1 Работа протокола SNMP в рамках модели OSI
Протокол SNMP традиционно используется для управления телекоммуникационным оборудованием. Для управления обычно применяются так называемые платформы сетевого управления, позволяющие осуществлять обнаружение устройств в сети, объединять модули управления оборудованием разных производителей, выполнять общие функции управления и оповещения. В число наиболее известных платформ сетевого управления входят HP OpenView (Hewlett-Packard), Solstice Domain Manager (Sun Microsystems), Tivoli NetView (Tivoli Systems), SNMPc (Castle Rock). Вместе с тем, управление с использованием SNMP может быть применено и для решения других задач в том числе для систем промышленного управления. Проиллюстрируем такой подход на реальном примере.
В ходе выполнения одного из экспортных контрактов корпорацией Стинс Коман была разработана, произведена и установлена на ТЭС Фалай (Вьетнам) система управления электрофильтром. Логически система была разделена на два уровня: нижний монтируемый в непосредственной близости от электрофильтра, и верхний осуществляющий сбор статистической информации и представляющий графически состояние всего объекта. От использования существующих SCADA-систем мы отказались из-за высокой стоимости пакета разработки и модулей времени выполнения, а также большого времени, необходимого на обучение разработчиков. Было решено пойти по пути собственной разработки. Связь между подсистемами верхнего и нижнего уровней была осуществлена традиционными для задач АСУ ТП методами. Из огромного количества используемых полевых протоколов был выбран один, наиболее подходящий по быстродействию и простоте реализации. Учитывая особенности этого протокола, был разработан программный комплекс, осуществляющий сбор информации, анализирующий статистику и графически представляющий состояние управляемого устройства.
Приступив к аналогичным работам по следующему контракту, мы постарались учесть уроки предыдущей разработки и при создании системы управления технологическими процессами воспользоваться нашим опытом проектирования больших сетевых комплексов. В новом варианте системы связь между уровнями осуществлялась по протоколу SNMP. В качестве программы верхнего уровня использовался описанный ниже универсальный SNMP-менеджер.
Использование принципов сетевого управления при создании систем управления технологическими процессами позволило избежать проблем, связанных с интеграцией различных уровней системы. Появился единый универсальный способ управления любым оборудованием, начиная от сетевого маршрутизатора и заканчивая электрофильтром. Для того чтобы появилась возможность управлять устройствами, которые ранее в принципе не подключались к сети, был разработан универсальный программно-аппаратный SNMP-агент eSCape. Это устройство построено на основе однокристального RISC-контроллера и для подключения к сети (локальной или территориально-распределенной) использует Ethernet или PPP. Оно обладает малым весом и невысокой стоимостью и предоставляет широкий выбор вариантов сопряжения с управляемым объектом.
При разработке системы промышленного управления, реализованной в виде SNMP-менеджера, изначально были сформулированы следующие требования:- новый программный продукт должен обеспечивать сбор и хранение статистических данных, которые должны легко импортироваться в другие программы;
- новый программный продукт должен работать как под управлением ОС MS Windows 9x/NT/2000, так и под управлением ОС Linux;
- новый программный продукт должен обеспечивать достаточное быстродействие на машинах бюджетного класса;
- для разработки программ рекомендуется использовать свободно распространяемые продукты с открытым исходным кодом.
В результате был разработан программный комплекс EscView, архитектура которого приведена на рис.2.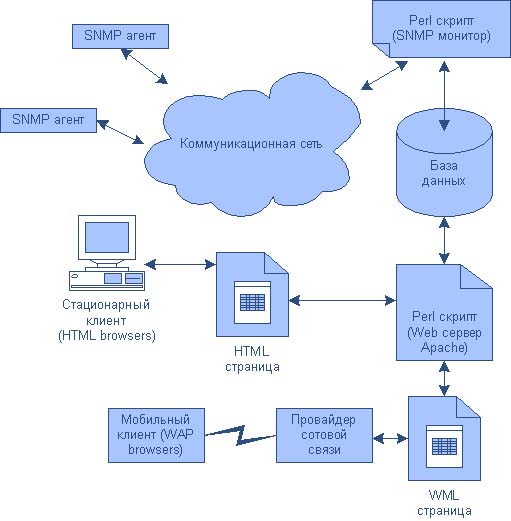
Рис.2 Программный комплекс, осуществляющий сбор информации, анализ статистики и графическое представление состояния управляемого устройства
Каждому управляемому устройству соответствует SNMP-агент, который может быть встроенным или внешним. SNMP-агенты, подключенные к сети протокола TCP/IP, периодически опрашиваются программой-монитором, которая написана на языке Perl. Периодичность и частота опроса, а также перечень интересующих SNMP-агентов записаны в базе данных, построенной на пакете программ MySQL. Все переменные, считанные в процессе опроса, сохраняются в базе данных. SNMP-агент может также сам проинформировать систему управления о том или ином изменении своего состояния. Для подачи команд устройствам необходимо изменить соответствующие поля базы данных. Все изменения, произошедшие в базе данных, адресно передаются SNMP-агентам.
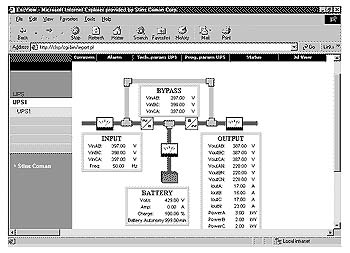
Рис.3 Пример диалога с пользователем в формате HTML-страницы
Для реализации графического интерфейса пользователя используется HTTP-сервер Apache. Программа, написанная на языке Perl, поддерживает диалоги с пользователем и при помощи базы данных динамически формирует ответ в формате HTML-страницы или в формате WML-страницы.
Страницы HTML предназначены для пользователей, работающих с любым Internet-браузером (например, MS Internet Explorer или Netscape Navigator). Пример реального диалога представлен на рис.3. Страницы WML предназначены для мобильных устройств, поддерживающих протокол WAP (таким устройством может быть сотовый телефон). Для поддержки WAP-клиентов никаких специальных аппаратных доработок производить не надо: в качестве шлюза выступают ресурсы, штатно предоставляемые сотовыми операторами. Соединение между сотовым шлюзом и SNMP-менеджером осуществляется через Internet.
Данное решение может функционировать как под управлением ОС MS Windows 9x/NT/2000, так и под управлением ОС UNIX/Linux. Все программные продукты, используемые при разработке, распространяются свободно.
Описываемое решение уже используется для обслуживания мощных источников бесперебойного питания. В настоящее время на базе этого решения разрабатывается комплекс программ, предназначенных для управления электрофильтром. Оно, в частности, может использоваться для создания интеллектуальных зданий, для распределенного сбора информации с датчиков, а также для реализации заданного промышленного управления через типовые объединённые сети.
[ http://www.mka.ru/?p=40138]Тематики
Действия
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > протокол управления простой сетью
-
3 программа управления шрифтами фирмы Adobe
программа управления шрифтами фирмы Adobe
Программа обеспечивает воспроизведение символов на экране дисплея или на печатающем устройстве, работающем с языком PostScript, используя PostScript-информацию о загружаемых шрифтах. При этом шрифты воспроизводятся точно — без ступенчатости и искажений.
[ http://www.morepc.ru/dict/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > программа управления шрифтами фирмы Adobe
-
4 знак или символ управления положением каретки и бумаги
Information technology: layout character (в печатающем устройстве)Универсальный русско-английский словарь > знак или символ управления положением каретки и бумаги
-
5 знак управления положением каретки и бумаги
Information technology: layout character (в печатающем устройстве)Универсальный русско-английский словарь > знак управления положением каретки и бумаги
-
6 символ управления положением каретки и бумаги
1) Computers: layout char2) Engineering: layout character3) Information technology: layout character (в печатающем устройстве)Универсальный русско-английский словарь > символ управления положением каретки и бумаги
-
7 адрес во внешнем запоминающем устройстве
1. external address2. external device addressРусско-английский большой базовый словарь > адрес во внешнем запоминающем устройстве
-
8 плотность информации в запоминающем устройстве
Русско-английский большой базовый словарь > плотность информации в запоминающем устройстве
-
9 блок обработки команд
n1) comput. Befehlsbewertungsblock, Befehlssteuerblock, Befehlsverarbeitungseinheit, Befehlswerk2) electr. Befehlssteuereinheit (в устройстве управления), Befehlswerk (в устройстве управления)3) IT. Befehlsblock, Befehlseinheit, Befehlsteil4) microel. BefehlssteuereinheitУниверсальный русско-немецкий словарь > блок обработки команд
-
10 given control loop
1. заданный контур ( обратной) связи ( в системе управления)Англо-русский словарь промышленной и научной лексики > given control loop
-
11 соединённый общим каналом
Automation: globally-connected (об устройстве управления)Универсальный русско-английский словарь > соединённый общим каналом
-
12 дешифратор кода операции
nIT. Befehlsdekodierer (в устройстве управления ВМ), OperationsumwandlerУниверсальный русско-немецкий словарь > дешифратор кода операции
-
13 блок обработки команд
( в устройстве управления) Befehlswerk, BefehlssteuereinheitRussian-german polytechnic dictionary > блок обработки команд
-
14 соединенный общим каналом
( об устройстве управления) globally-connectedРусско-английский исловарь по машиностроению и автоматизации производства > соединенный общим каналом
-
15 PI
priority interrupting channel — канал приоритетного прерывания (используется в устройстве управления СПД ВМС США NTDS); см. NNC -
16 установленное значение срабатывания
установленное значение срабатывания
Rаn
Значение сопротивления (постоянное или регулируемое) изоляции, заданное на устройстве контроля, обеспечивающем срабатывание, если сопротивление изоляции падает ниже данного значения.
[ ГОСТ Р 61557-1-2006]Тематики
EN
3.102 установленное значение срабатывания (specified response value) Ran: Значение сопротивления изоляции, постоянно установленное или регулируемое в устройстве контроля, срабатывающем при снижении сопротивления изоляции ниже данного предельного значения.
Источник: ГОСТ Р 51522.2.4-2011: Совместимость технических средств электромагнитная. Электрическое оборудование для измерения, управления и лабораторного применения. Часть 2-4. Частные требования к устройствам мониторинга изоляции и определения мест нарушения изоляции. Испытательные конфигурации, рабочие условия и критерии качества функционирования оригинал документа
3.8.3 установленное значение срабатывания (specified responce value) Rаn Значение сопротивления (постоянное или регулируемое) изоляции, заданное на устройстве контроля, обеспечивающем срабатывание, если сопротивление изоляции падает ниже данного значения.
Источник: ГОСТ Р МЭК 61557-1-2005: Сети электрические распределительные низковольтные напряжением до 1000 В переменного тока и 1500 В постоянного тока. Электробезопасность. Аппаратура для испытания, измерения или контроля средств защиты. Часть 1. Общие требования оригинал документа
Русско-английский словарь нормативно-технической терминологии > установленное значение срабатывания
-
17 синхронизация времени
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
Русско-английский словарь нормативно-технической терминологии > синхронизация времени
-
18 положение
position
- (летательного аппарата в пространстве в полете или на земле) — attitude. the position or orientation of an aircraft, either in flight motion or at rest.
-, боковое (ла в горизонтальной плоскости относительно равносигнапьной зоны крм) — lateral displacement
-, боковое (ла относительно линии заданного азимута) — azimuth deviation
-, взлетное — takeoff position
- "включено" (выкпючателя) — on position
- "выключено" — off position
-, выпущенное — extended position
- гироскопа в (инерциальном) пространстве — orientation of gyro in inertial space
to maintain gyro orientation in inertial space.
- закрылка(ов) — flap position /setting/
- закрылков, взлетное — flap takeoff position
- закрылков для захода на посадку — flap approach position
- закрылков, полетное — flap enroute position
- закрылков, полностью выпущенное — flap fully extended position
- закрылков, полностью убрапное — flap fully retracted position
- закрылков, посадочное — flap landing position, flaps in landing configuration /position, setting/
закрылки устанавливаются в посадочное положение непосредственно перед выполнением посадки. — flaps must be in landing position from the point immediately before landing.
- "закрыто" — closed position
- звезды, расчетное — computed star location (to calculate actual position)
- звезды, фактическое — actual star location
-, исходное — initial position
-, кажущееся — apparent position
-, крайнее — extreme position
-, крайнее заднее — extreme /full/ rear position
установить рычаг управления из крайнего заднего в крайнее переднее положение. — move the control lever from the extreme rear position to full forward position.
-, крайнее переднее — extreme /full/ forward position
-, критическое — critical condition
-, крейсерское (элерона-зaкрылка) — cruise position
-, маневренное (элерона-закрылка) — maneuvers position
-, начальное — initial position
-, нейтральное — neutral position
-, нивелировочное — rigging position
установка самолета в линию горизонтального полета без крена. — rigging position is an aircraft attitude in which the lateral axis is horizontal and an arbitrary longitudinal datum line is also horizontal.
-, новое — new position
-, нормальное полетное — normal flight attitude
-, нулевое (в гироприборах, маятника акселерометра) — null position. то drive the gyro rotor to a null position.
-, нулевое (о показаниях прибора) — zero reading
-, опасное — dangerous condition
- "открыто" (напр., крана) — open position
- переключателя "а" обеспечивает автоматическое управление (напр., выбором ппм) — switch position activatas /ontails, enables/ automatic seisction (of route legs)
-, первоначальное — original position
- no крену — roll attilade
- no курсу — yaw attitude
- no тангажу — pitch attitude
af the desired pitch attitude.
- покоя — position at rest
-, полетное (самолета) — flight altitude
-, полетное (элементов управления) — en route position, airmjrne раsition
-, походное — stowed position, stowage
-, промежуточное (о створках или шасси, находящихся в движении на уборку или выпуск) — in-transit position. the red door and intransit (in trans) ligilts will be illulninated if any gear door is open.
-, рабочее (напр., прибора или поверочного пульта) — operating position
-, расчетное (местоположение ла) — computed position
- руд (рычага управления двиг.) — throttle setting /position/
- рычага — lever position
- рычага управления двигате лем (руд) — throttle position
- (местоположение) самолета — аircraft present position (pos)
- самолета, обеспечивающее максимальную плавучесть после посадки на воду — best notation attitude. a forward cg, within cg limits, provides best notation attitude when the airplane comes to rest in the water.
- (местоположение) самолета, текущее — aircraft present position (pos)
-, сбалансированное (самолета) — trimmed attitude
- сектора газа — throttle position /setting/
- складывающегося подноса (шасси) с образованием "стрелы" прогиба, фиксиро ванное — folding strut over center locked position
-, среднее (напр., переключателя, задатчика) — mid position
set zone temperature selector to mid position.
-, стояночное (самолета) — static ground position
-, стояночное (при посадке вертолета) — level attitude
-, убранное (шасси, закрылков) — retracted position
-, убранное (походное) — stowed position
-, угловое — angular position
-, установочное (прибора, агрегата) — mounting attitude
-, установленное (рычага управления) — set position. each control must be able to maintain any set position.
-, фиксированное — locked position
-, фиксированное (рычага уnравнения) (рис. 57) — detent position
рычаг крана останова двигателя имеет три фиксированных положения: стоп, запуск, работа. — each hp cock control lever has detent positions, off, start, run.
-, флюгерное (воздушного винта) (рис.58) — (ropeller) feathered position
-, чрезвычайное — state of emergency
- шасси — landing gear position
в закрытом (открытом) п. — in closed (open) position
возвращение стрелки (прибоpa) в исходное (нулевое) п. — pointer return to initial (zero) position
возвращаться в исходное п. (о системе автоматики, предохранительном устройстве) — reset
выводить из нейтрального п. — move from the neutral position
заедать в закрытом (открытом) п. — be stuck closed (open)
занимать правильное п. (самостоятельно) — right itself. capsized liferaft should right itself.
изменять п. — change the position
изменять п. (органа управления, переключателя) — reposition the contr switch)
не находиться в какомлибо п. — be off position
не находиться в нулевом п. (о стрелке прибора) — be off zero point. note number of degrees, with pointer off zero point.
оставаться в п. — remain in the position
оставаться в горизонтальном п. — remain level
принимать требуемое п. в пространстве — assume proper attitude
сохранять горизонтальное п. — keep level
ставить в... п. — set... to position
устанавливать (оборудование) в походное п. — stow (equipment), place (equipment) in stowage
устанавливать самолет в горизонтальное п. — level the airplane
фиксировать в закрытом (открытом) п. — lock closed (open)Русско-английский сборник авиационно-технических терминов > положение
-
19 в
аварийная ситуация в полетеin-flight emergencyаварийное табло в кабине экипажаcabin emergency lightаварийный клапан сброса давления в системе кондиционированияconditioned air emergency valveавтоматическая информация в районе аэродромаautomatic terminal informationавтомат тяги в системе автопилотаautopilot auto throttleаэровокзал в форме полумесяцаcrescent-shaped terminalаэродинамическая труба для испытаний на сваливание в штопорspin wind tunnelаэродинамическая труба для испытания моделей в натуральную величинуfull-scale wind tunnelбалансировка в горизонтальном полетеhorizontal trimбалансировка в полетеoperational trimбезопасная дистанция в полетеin-flight safe distanceбилет в одном направленииone-way ticketбилет на полет в одном направленииsingle ticketбоковой обзор в полетеsideway inflight viewв аварийной обстановкеin emergencyвведение в виражbankingвведение в действие пассажирских и грузовых тарифовfares and rates enforcementввод в эксплуатациюintroduction into serviceвводить воздушное судно в кренroll in the aircraftвводить в штопорput into the spinвводить в эксплуатацию1. go into service2. come into operation 3. place in service 4. enter service 5. introduce into service 6. put in service 7. put in operation вводить шестерни в зацеплениеmesh gearsв воздухе1. up2. aloft вентилятор в кольцевом обтекателеduct fanвертолет в режиме висенияhovering helicopterверхний обзор в полетеupward inflight viewветер в верхних слоях атмосферы1. upper wind2. aloft wind ветер в направлении курса полетаtailwindв заданном диапазонеwithin the rangeв западном направленииwestwardвзлет в условиях плохой видимостиlow visibility takeoffв зоне влияния землиin ground effectв зоне действия лучаon the beamвидимость в полетеflight visibilityвидимость в пределах допускаmarginal visibilityвидимость у земли в зоне аэродромаaerodrome ground visibilityвизуальная оценка расстояния в полетеdistance assessmentвизуальный контакт в полетеflight visual contactвизуальный ориентир в полетеflight visual cueв интересах безопасностиin interests of safetyвисение в зоне влияния землиhovering in the ground effectвихрь в направлении линии полетаline vortexв конце участкаat the end of segment(полета) в конце ходаat the end of stroke(поршня) в конце циклаat the end ofв начале участкаat the start of segment(полета) в начале циклаat the start of cycleв обратном направленииbackwardв ожидании разрешенияpending clearanceвозвращаться в пункт вылетаfly backвоздух в пограничном слоеboundary-layer airвоздух в турбулентном состоянииrough airвоздухозаборник в нижней части фюзеляжаbelly intakeвоздушная обстановка в зоне аэродромаaerodrome air pictureвоздушное судно в зоне ожиданияholding aircraftвоздушное судно в полете1. making way aircraft2. aircraft on flight 3. in-flight aircraft воздушное судно, дозаправляемое в полетеreceiver aircraftвоздушное судно, занесенное в реестрaircraft on registerвоздушное судно, находящееся в воздухеairborne aircraftвоздушное судно, находящееся в эксплуатации владельцаowner-operated aircraftвоздушное судно, нуждающееся в помощиaircraft requiring assistanceвоздушное судно, прибывающее в конечный аэропортterminating aircraftв подветренную сторонуaleeв поле зренияin sightв пределахwithin the frame ofв процессе взлетаduring takeoffв процессе полета1. while in flight2. in flight в процессе руленияwhile taxiingв рабочем состоянииoperationalв режимеin modeв режиме большого шагаin coarse pitchв режиме готовностиin alertв режиме малого шагаin fine pitchв режиме самоориентированияwhen castoringвремя в рейсе1. chock-to-chock time2. ramp-to-ramp time 3. block-to-block hours 4. block-to-block time 5. ramp-to-ramp hours время налета в ночных условияхnight flying timeвремя налета в часахhour's flying timeвремя фактического нахождения в воздухеactual airborne timeв рядabreastв случае задержкиin the case of delayв случае происшествияin the event of a mishapв случая отказаin the event of malfunctionв соответствии с техническими условиямиin conformity with the specificationsв состоянии бедствияin distressв состоянии готовностиwhen under wayв условиях обтеканияairflow conditionsв хвостовой части1. abaft2. aft вход в зону аэродрома1. entry into the aerodrome zone2. inward flight входить в глиссадуgain the glide pathвходить в зону глиссадыreach the glide pathвходить в круг движенияenter the traffic circuitвходить в облачностьenter cloudsвходить в разворот1. roll into the turn2. initiate the turn 3. enter the turn входить в условияpenetrate conditionsвходить в штопорenter the spinвходить в этап выравниванияentry into the flareвхожу в кругon the upwind legв целях безопасностиfor reasons of safetyвыполнять полет в зоне ожиданияhold over the aidsвыполнять полет в определенных условияхfly under conditionsвыполнять полет в режиме ожидания над аэродромомhold over the beaconвыполнять установленный порядок действий в аварийной ситуацииexecute an emergency procedureвыравнивание в линию горизонтаlevelling-offвыравнивание при входе в створ ВППrunway alignmentвысота в зоне ожиданияholding altitudeвысота в кабинеcabin pressureвысота плоскости ограничения препятствий в зоне взлетаtakeoff surface levelвысота полета в зоне ожиданияholding flight levelвысотомер, показания которого выведены в ответчикsquawk altimeterвыход в равносигнальную зонуbracketingв эксплуатацииin serviceв эксплуатациюin operationгасить скорость в полетеdecelerate in the flightголовокружение при полете в сплошной облачностиcloud vertigoгоризонт, видимый в полетеin-flight apparent horizonгосподство в воздухеair supremacyграница высот повторного запуска в полетеinflight restart envelopeгрубая ошибка в процессе полетаin flight blunderгруз, сброшенный в полетеjettisoned load in flightдавление в аэродинамической трубеwind-tunnel pressureдавление в кабинеcabin pressureдавление в невозмущенном потокеundisturbed pressureдавление в свободном потокеfree-stream pressureдавление в системе подачи топливаfuel supply pressureдавление в системе стояночного тормозаperking pressureдавление в скачке уплотненияshock pressureдавление в спутной струеwake pressureдавление в топливном бакеtank pressureдавление в тормозной системеbrake pressureдавление в точке отбораtapping pressureдавление на входе в воздухозаборникair intake pressureдальность видимости в полетеflight visual rangeдальность полета в невозмущенной атмосфереstill-air flight rangeданные в узлах координатной сеткиgrid-point dataданные о результатах испытания в воздухеair dataдвигатель, расположенный в крылеin-wing mountedдвигатель, установленный в мотогондолеnaccele-mounted engineдвигатель, установленный в отдельной гондолеpodded engineдвигатель, установленный в фюзеляжеin-board engineдвижение в зоне аэродромаaerodrome trafficдвижение в зоне аэропортаairport trafficдействия в момент касания ВППtouchdown operationsделать отметку в свидетельствеendorse the licenseделитель потока в заборном устройствеinlet splitterдержать шарик в центреkeep the ball centeredдозаправка топливом в полетеair refuellingдозаправлять топливом в полетеrefuel in flightдопуск к работе в качестве пилотаact as a pilot authorityдоставка пассажиров в аэропорт вылетаpickup serviceединый тариф на полет в двух направленияхtwo-way fareзавоевывать господство в воздухеgain the air supremacyзадатчик высоты в кабинеcabin altitude selectorзадержка в базовом аэропортуterminal delayзал таможенного досмотра в аэропортуairport customs roomзамер в полетеinflight measurementзаносить воздушное судно в реестрenter the aircraftзапись вибрации в полетеinflight vibration recordingзапись в формуляреlog book entryзапись переговоров в кабине экипажаcockpit voice recordingзапускать воздушное судно в производствоput the aircraft into productionзапускать двигатель в полетеrestart the engine in flightзапуск в воздухе1. air starting2. airstart запуск в полетеinflight startingзапуск в полете без включения стартераinflight nonassisted startingзапуск в режиме авторотацииwindmill startingзаход на посадку в режиме планированияgliding approachзаход на посадку в условиях ограниченной видимостиlow-visibility approachзона движения в районе аэродромаaerodrome traffic zoneизменение направления ветра в районе аэродромаaerodrome wind shiftизмерение шума в процессе летных испытанийflight test noise measurementиметь место в полетеbe experienced in flightимитация в полетеinflight simulationимитация полета в натуральных условияхfull-scale flightиндекс опознавания в коде ответчикаsquawk identиндикатор обстановки в вертикальной плоскостиvertical-situation indicatorинструктаж при аварийной обстановке в полетеinflight emergency instructionискусственные сооружения в районе аэродромаaerodrome cultureиспытание в аэродинамической трубеwind-tunnel testиспытание в воздухеair trialиспытание в гидроканалеtowing basing testиспытание в двухмерном потокеtwo-dimensional flow testиспытание вертолета в условиях снежного и пыльного вихрейrotocraft snow and dust testиспытание воздушного судна в термобарокамереaircraft environmental testиспытание в реальных условияхdirect testиспытание в режиме висенияhovering testиспытание в свободном полетеfree-flight testиспытание двигателя в полетеinflight engine testиспытания в барокамереaltitude-chamber testиспытания по замеру нагрузки в полетеflight stress measurement testsиспытываемый в полетеunder flight testиспытывать в полетеtest in flightисследование конфликтной ситуации в воздушном движенииair conflict searchканал в ступице турбиныturbine boreканал передачи данных в полетеflight data linkкарта особых явлений погоды в верхних слоях атмосферыhigh level significant weather chartкнопка запуска двигателя в воздухеflight restart buttonкок винта в сбореcone assyкомпенсация за отказ в перевозкеdenied boarding compensationкомпоновка кресел в салоне первого классаfirst-class seatingкомпоновка кресел в салоне смешанного классаmixed-class seatingкомпоновка кресел в салоне туристического классаeconomy-class seatingкомпоновка приборной доски в кабине экипажаcockpit panel layoutконтракт на обслуживание в аэропортуairport handling contractконтроль в зонеarea watchконтур уровня шума в районе аэропортаairport noise contourконцевой выключатель в системе воздушного суднаaircraft limit switchкривая в полярной системе координатpolar curveкрутящий момент воздушного винта в режиме авторотацииpropeller windmill torqueкурс в зоне ожиданияholding courseлетать в курсовом режимеfly heading modeлетать в режиме бреющего полетаfly at a low levelлетать в светлое время сутокfly by dayлетать в строюfly in formationлетать в темное время сутокfly at nightлетать по приборам в процессе тренировокfly under screenлететь в северном направленииfly northboundлетная подготовка в условиях, приближенных к реальнымline oriental flight trainingлиния руления воздушного судна в зоне стоянкиaircraft stand taxilaneлюк в крылеwing manholeманевр в полетеinflight manoeuvreмаршрут перехода в эшелона на участок захода на посадкуfeeder routeмаршрут полета в направлении от вторичных радиосредствtrack from secondary radio facilityмеры безопасности в полетеflight safety precautionsметеоусловия в пределах допускаmarginal weatherмеханизм для создания условий полета в нестабильной атмосфереrough air mechanismмеханизм открытия защелки в полетеmechanical flight release latchмешать обзору в полетеobscure inflight viewнабор высоты в крейсерском режимеcruise climbнавигация в зоне подходаapproach navigationнагрузка в полетеflight loadнагрузка в полете от поверхности управленияflight control loadнадежность в полетеinflight reliabilityнаправление в сторону подъемаup-slope directionнаправление в сторону уклонаdown-slope directionнаправляющийся вbound forнаработка в часах1. running hours2. endurance hours на участке маршрута в восточном направленииon the eastbound legнеобходимые меры предосторожности в полетеflight reasonable precautionsнеожиданное препятствие в полетеhidden flight hazardнеправильно оцененное расстояние в полетеmisjudged flight distanceнеправильно принятое в полете решениеimproper in-flight decisionнижний обзор в полетеdownward inflight viewноситель информации в виде металлической лентыmetal tape mediumноситель информации в виде пластиковой пленкиplastic tape mediumноситель информации в виде фольгиengraved foil mediumноситель информации в виде фотопленкиphotographic paper mediumобзор в полетеinflight viewоборудование для полетов в темное время сутокnight-flying equipmentобслуживание в процессе стоянкиstanding operationобслуживание пассажиров в городском аэровокзалеcity-terminal coach serviceобучение в процессе полетовflying trainingобъем воздушных перевозка в тоннах грузаairlift tonnageобязанности экипажа в аварийной обстановкеcrew emergency dutyобязательно к выполнению в соответствии со статьейbe compulsory Articleограничения, указанные в свидетельствеlicense limitationsожидание в процессе полетаhold en-routeопознавание в полетеaerial identificationопробование систем управления в кабине экипажаcockpit drillопыт работы в авиацииaeronautical experienceорганы управления в кабине экипажаflight compartment controlsосадки в виде крупных хлопьев снегаsnow grains precipitationосадки в виде ледяных крупинокice pellets precipitationослабление видимости в атмосфереatmospheric attenuationослабление сигналов в атмосфереatmospheric lossослаблять давление в пневматикеdeflate the tireосмотр в конце рабочего дняdaily inspectionособые меры в полетеin-flight extreme careоставаться в горизонтальном положенииremain levelотводить воздух в атмосферуdischarge air overboardотказ в перевозке1. denial of carriage2. denied boarding 3. bumping отработка действий на случай аварийной обстановки в аэропортуaerodrome emergency exerciseотражатель в механизме реверса тягиpower reversal ejectorотсутствие ветра в районеaerodrome calmоценка пилотом ситуации в полетеpilot judgementошибка в настройкеalignment errorпадение в перевернутом положенииtip-over fallпарить в воздухеsailперебои в зажиганииmisfireперебои в работе двигателя1. rough engine operations2. engine trouble переводить воздушное судно в горизонтальный полетput the aircraft overперевозка с оплатой в кредитcollect transportationпередача в пункте стыковки авиарейсовinterline transferпередвижной диспетчерский пункт в районе ВППrunway control vanпередний обзор в полетеforward inflight viewпереход в режим горизонтального полетаpuchoverпереходить в режим набора высотыentry into climbповторный запуск в полетеflight restartподача топлива в систему воздушного суднаaircraft fuel supplyподниматься в воздухago aloftпожар в отсеке шассиwheel-well fireпоиск в условном квадратеsquare searchполет в восточном направленииeastbound flightполет в зоне ожидания1. holding2. holding flight полет в направлении на станциюflight inbound the stationполет в направлении от станцииflight outbound the stationполет в невозмущенной атмосфереstill-air flightполет в нормальных метеоусловияхnormal weather operationполет в обоих направленияхback-to-back flightполет в одном направленииone-way flightполет в пределах континентаcoast-to-coast flightполет в режиме висенияhover flightполет в режиме ожиданияholding operationполет в режиме ожидания на маршрутеholding en-route operationполет в связи с особыми обстоятельствамиspecial event flightполет в сложных метеоусловияхbad-weather flightполет в строюformation flightполет в условиях болтанки1. bumpy-air flight2. turbulent flight полет в условиях отсутствия видимостиnonvisual flightполет в условиях плохой видимостиlow-visibility flightполет в установленной зонеstandoff flightполет в установленном сектореsector flightполетное время, продолжительность полета в данный деньflying time todayполет по кругу в районе аэродромаaerodrome traffic circuit operationполет с дозаправкой топлива в воздухеrefuelling flightполеты в районе открытого моряoff-shore operationsполеты в светлое время сутокdaylight operationsполеты в темное время сутокnight operationsположение амортизатора в обжатом состоянииshock strut compressed positionположение в воздушном пространствеair positionпомпаж в воздухозаборникеair intake surgeпопадание в порыв ветраgust penetrationпопадание в турбулентностьturbulence penetrationпорядок действий в аварийной обстановкеemergency procedureпорядок эксплуатации в зимних условияхsnow planпосадка в режиме авторотации в выключенным двигателемpower-off autorotative landingпосадка в светлое время сутокday landingпосадка в сложных метеоусловияхbad weather landingпосадка в темное время сутокnight landingпотери в воздухозаборникеintake lossesпоток в промежуточных аэродромахpick-up trafficпотолок в режиме висенияhovering ceilingправила полета в аварийной обстановкеemergency flight proceduresпредставлять в закодированном видеsubmit in codeпредупреждение столкновений в воздухеmid air collision controlпрепятствие в зоне захода на посадкуapproach area hazardпрепятствие в районе аэропортаairport hazardприбывать в зону аэродромаarrive over the aerodromeприведение в действиеactuationприведение эшелонов в соответствиеcorrelation of levelsприводить в действиеactuateприводить воздушное судно в состояние летной годностиreturn an aircraft to flyable statusприводить в рабочее состояниеprepare for serviceприводить в состояние готовностиalert toпригодный для полета только в светлое время сутокavailable for daylight operationприспособление для захвата объектов в процессе полетаflight pick-up equipmentпроверено в полетеflight checkedпроверка в кабине экипажаcockpit checkпроверка в полетеflight checkпроверка в процессе облетаflyby checkпрогноз в графическом изображенииpictorial forecastпродолжительность в режиме висенияhovering enduranceпродувать в аэродинамической трубеtest in the wind tunnelпроизводить посадку в самолетemplaneпроисшествие в районе аэропортаairport-related accidentпрокладка в системе двигателяengine gasketпрокладка маршрута в районе аэродромаterminal routingпропуск на вход в аэропортairport laissez-passerпросвет в облачностиcloud gapпространственная ориентация в полетеinflight spatial orientationпространственное положение в момент удараattitude at impactпротивобликовая защита в кабинеcabin glare protectionпрофиль волны в свободном полеfree-field signatureпрофиль местности в районе аэродромаaerodrome ground profileпружина распора в выпущенном положенииdownlock bungee spring(опоры шасси) пункт назначения, указанный в авиабилетеticketed destinationпункт назначения, указанный в купоне авиабилетаcoupon destinationработа в режиме запуска двигателяengine start modeработа только в режиме приемаreceiving onlyрадиолокационный обзор в полетеinflight radar scanningрадиус действия радиолокатора в режиме поискаradar search rangeразворот в процессе планированияgliding turnразворот в режиме висенияhovering turnразворот в сторону приближенияinbound turnразворот в сторону удаленияoutbound turnразмещать в воздушном суднеfill an aircraft withразница в тарифах по классамclass differentialразрешение в процессе полета по маршрутуen-route clearanceразрешение на полет в зоне ожиданияholding clearanceрасстояние в миляхmileageрасстояние в милях между указанными в билете пунктамиticketed point mileageрасчетное время в путиestimated time en-routeрегистрация в зале ожиданияconcourse checkрегулятор давления в кабинеcabin pressure regulatorрежим воздушного потока в заборнике воздухаinlet airflow scheduleрежим малого газа в заданных пределахdeadband idleречевой регистратор переговоров в кабине экипажаcockpit voice recorderруководство по производству полетов в зоне аэродромаaerodrome rulesрулежная дорожка в районе аэровокзалаterminal taxiwayсближение в полетеair missсваливание в штопорspin stallсдавать в багажpark in the baggageсдвиг ветра в зоне полетаflight wind shearсигнал бедствия в коде ответчикаsquawk maydayсигнал входа в глиссадуon-slope signalсигнал действий в полетеflight urgency signalсигнализация аварийной обстановки в полетеair alert warningсигнал между воздушными судами в полетеair-to-air signalсигнальные огни входа в створ ВППrunway alignment indicator lightsсистема предупреждения конфликтных ситуаций в полетеconflict alert systemсистема распространения информации в определенные интервалы времениfixed-time dissemination systemсистема регулирования температуры воздуха в кабинеcabin temperature control systemскольжение в направлении полетаforwardslipскорость в условиях турбулентности1. rough-air speed2. rough airspeed скрытое препятствие в районе ВППrunway hidden hazardсложные метеоусловия в районе аэродромаaerodrome adverse weatherслужба управления движением в зоне аэродромаaerodrome control serviceслужба управления движением в зоне аэропортаairport traffic serviceсмесеобразование в карбюратореcarburetionс момента ввода в эксплуатациюsince placed in serviceснежный заряд в зоне полетаinflight snow showersснижение в режиме авторотацииautorotative descentснижение в режиме планированияgliding descentснижение в режиме торможенияbraked descentснимать груз в контейнереdischarge the cargoсобытие в результате непреднамеренных действийunintentional occurrenceсовершать посадку в направлении ветраland downwindсогласованность в действияхcoherenceсписание девиации в полетеairswingingсписание девиации компаса в полетеair compass swingingсписание радиодевиации в полетеairborne error measurementспособность выполнять посадку в сложных метеорологических условияхall-weather landing capabilityсрок службы в часах налетаflying lifeсрываться в штопор1. fall into the spin2. fail into the spin ставить в определенное положениеposeстолкновение в воздухе1. mid-air collision2. aerial collision схема в зоне ожиданияholding patternсхема входа в диспетчерскую зонуentry procedureсхема входа в зону ожиданияholding entry procedureсхема движения в зоне аэродромаaerodrome traffic patternсхема полета в зоне ожиданияholding procedureсхема полета по приборам в зоне ожиданияinstrument holding procedureсчетчик пройденного километража в полетеair-mileage indicatorсчитывание показаний приборов в полетеflight instrument readingтариф в местной валютеlocal currency fareтариф в одном направленииdirectional rateтариф для полета в одном направленииsingle fareтариф за перевозку грузов в специальном приспособлении для комплектованияunit load device rateтариф на полет в ночное время сутокnight fareтариф на полет с возвратом в течение сутокday round trip fareтелесное повреждение в результате авиационного происшествияaccident serious injuryтемпература в данной точкеlocal temperatureтемпература воздуха в трубопроводеduct air temperatureтемпература газов на входе в турбинуturbine entry temperatureтемпература на входе в турбинуturbine inlet temperatureтраектория полета в зоне ожиданияholding pathтрение в опорахbearing frictionтренировка в барокамереaltitude chamber drillтурбулентность в атмосфере без облаковclear air turbulenceтурбулентность в облакахturbulence in cloudsтурбулентность в спутном следеwake turbulenceтяга в полетеflight thrustугроза применения взрывчатого устройства в полетеinflight bomb threatудельный расход топлива на кг тяги в часthrust specific fuel consumptionудерживать контакты в замкнутом положенииhold contacts closedудостоверяющая запись в свидетельствеlicence endorsementуказания по условиям эксплуатации в полетеinflight operational instructionsуказатель входа в створ ВППrunway alignment indicatorуказатель высоты в кабинеcabin altitude indicatorуказатель местоположения в полетеair position indicatorуказатель перепада давления в кабинеcabin pressure indicatorуказатель уровня в бакеtank level indicatorуменьшение ограничений в воздушных перевозкахair transport facilitationупаковывать в контейнереcontainerizeупаковывать груз в контейнереcontainerize the cargoуправление в зонеarea controlуправление в зоне аэродромаaerodrome controlуправление в зоне захода на посадкуapproach controlуровень шума в населенном пунктеcommunity noise levelуровень шумового фона в кабине экипажаflight deck aural environmentуровень шумового фона в районе аэропортаacoustic airport environmentуровень электролита в аккумулятореbattery electrolyte levelусилие в системе управленияcontrol forceусловия в полетеin-flight conditionsусловия в районе аэродромаaerodrome environmentусловия в районе ВППrunway environmentусловия нагружения в полетеflight loading conditionsусловное обозначение в сообщении о ходе полетаflight report identificationусловное обозначение события в полетеflight occurrence identificationустанавливать наличие воздушной пробки в системеdetermine air in a systemустановка в определенное положениеpositioningустановка в положение для захода на посадкуapproach settingустановленные обязанности в полетеprescribed flight dutyустановленный в гондолеnacelle-mountedустойчивость в полетеinflight stabilityустройство отображения информации в кабине экипажаcockpit displayустройство разворота в нейтральное положениеself-centering deviceуточнение плана полета по сведениям, полученным в полетеinflight operational planningухудшение в полетеflight deteriorationучастие в расследованииparticipation in the investigationформа крыла в планеwing planformхарактеристика в зоне ожиданияholding performanceцифровая система наведения в полетеdigital flight guidance systemчартерный рейс в связи с особыми обстоятельствамиspecial event charterчисло оборотов в минутуrevolutions per minuteчрезвычайное обстоятельство в полетеflight emergency circumstanceшаг в режиме торможенияbraking pitchшасси, убирающееся в фюзеляжinward retracting landing gearшлиц в головке винтаscrew head slotэксплуатировать в заданных условияхoperate under the conditionsэксплуатировать в соответствии с техникой безопасностиoperate safetyэтапа полета в пределах одного государстваdomestic flight stageэтап входа в глиссадуglide capture phaseэтап полета, указанный в полетном купонеflight coupon stageэшелонирование в зоне ожиданиеholding stack -
20 технология коммутации
технология коммутации
-
[Интент]Современные технологии коммутации
[ http://www.xnets.ru/plugins/content/content.php?content.84]Статья подготовлена на основании материалов опубликованных в журналах "LAN", "Сети и системы связи", в книге В.Олифер и Н.Олифер "Новые технологии и оборудование IP-сетей", на сайтах www.citforum.ru и опубликована в журнале "Компьютерные решения" NN4-6 за 2000 год.
- Введение
- Коммутация первого уровня.
- Коммутация второго уровня.
- Коммутация третьего уровня.
- Коммутация четвертого уровня.
- Критерии выбора оборудования, физическая и логическая структура сети
- Качество обслуживания (QoS) и принципы задания приоритетов
- Заключение
Введение
На сегодня практически все организации, имеющие локальные сети, остановили свой выбор на сетях типа Ethernet. Данный выбор оправдан тем, что начало внедрения такой сети сопряжено с низкой стоимостью и простотой реализации, а развитие - с хорошей масштабируемостью и экономичностью.
Бросив взгляд назад - увидим, что развитие активного оборудования сетей шло в соответствии с требованиями к полосе пропускания и надежности. Требования, предъявляемые к большей надежности, привели к отказу от применения в качестве среды передачи коаксиального кабеля и перевода сетей на витую пару. В результате такого перехода отказ работы соединения между одной из рабочих станций и концентратором перестал сказываться на работе других рабочих станций сети. Но увеличения производительности данный переход не принес, так как концентраторы используют разделяемую (на всех пользователей в сегменте) полосу пропускания. По сути, изменилась только физическая топология сети - с общей шины на звезду, а логическая топология по-прежнему осталась - общей шиной.
Дальнейшее развитие сетей шло по нескольким путям:- увеличение скорости,
- внедрение сегментирования на основе коммутации,
- объединение сетей при помощи маршрутизации.
Увеличение скорости при прежней логической топологии - общая шина, привело к незначительному росту производительности в случае большого числа портов.
Большую эффективность в работе сети принесло сегментирование сетей с использованием технология коммутации пакетов. Коммутация наиболее действенна в следующих вариантах:
Вариант 1, именуемый связью "многие со многими" – это одноранговые сети, когда одновременно существуют потоки данных между парами рабочих станций. При этом предпочтительнее иметь коммутатор, у которого все порты имеют одинаковую скорость, (см. Рисунок 1).
Вариант 2, именуемый связью "один со многими" – это сети клиент-сервер, когда все рабочие станции работают с файлами или базой данных сервера. В данном случае предпочтительнее иметь коммутатор, у которого порты для подключения рабочих станций имеют одинаковую небольшую скорость, а порт, к которому подключается сервер, имеет большую скорость,(см. Рисунок 2).

Когда компании начали связывать разрозненные системы друг с другом, маршрутизация обеспечивала максимально возможную целостность и надежность передачи трафика из одной сети в другую. Но с ростом размера и сложности сети, а также в связи со все более широким применением коммутаторов в локальных сетях, базовые маршрутизаторы (зачастую они получали все данные, посылаемые коммутаторами) стали с трудом справляться со своими задачами.
Проблемы с трафиком, связанные с маршрутизацией, проявляются наиболее остро в средних и крупных компаниях, а также в деятельности операторов Internet, так как они вынуждены иметь дело с большими объемами IP-трафика, причем этот трафик должен передаваться своевременно и эффективно.
С подключением настольных систем непосредственно к коммутаторам на 10/100 Мбит/с между ними и магистралью оказывается все меньше промежуточных устройств. Чем выше скорость подключения настольных систем, тем более скоростной должна быть магистраль. Кроме того, на каждом уровне устройства должны справляться с приходящим трафиком, иначе возникновения заторов не избежать.
Рассмотрению технологий коммутации и посвящена данная статья.Коммутация первого уровня
Термин "коммутация первого уровня" в современной технической литературе практически не описывается. Для начала дадим определение, с какими характеристиками имеет дело физический или первый уровень модели OSI:
физический уровень определяет электротехнические, механические, процедурные и функциональные характеристики активации, поддержания и дезактивации физического канала между конечными системами. Спецификации физического уровня определяют такие характеристики, как уровни напряжений, синхронизацию изменения напряжений, скорость передачи физической информации, максимальные расстояния передачи информации, физические соединители и другие аналогичные характеристики.
Смысл коммутации на первом уровне модели OSI означает физическое (по названию уровня) соединение. Из примеров коммутации первого уровня можно привести релейные коммутаторы некоторых старых телефонных и селекторных систем. В более новых телефонных системах коммутация первого уровня применяется совместно с различными способами сигнализации вызовов и усиления сигналов. В сетях передачи данных данная технология применяется в полностью оптических коммутаторах.Коммутация второго уровня
Рассматривая свойства второго уровня модели OSI и его классическое определение, увидим, что данному уровню принадлежит основная доля коммутирующих свойств.
Определение. Канальный уровень (формально называемый информационно-канальным уровнем) обеспечивает надежный транзит данных через физический канал. Канальный уровень решает вопросы физической адресации (в противоположность сетевой или логической адресации), топологии сети, линейной дисциплины (каким образом конечной системе использовать сетевой канал), уведомления о неисправностях, упорядоченной доставки блоков данных и управления потоком информации.
На самом деле, определяемая канальным уровнем модели OSI функциональность служит платформой для некоторых из сегодняшних наиболее эффективных технологий. Большое значение функциональности второго уровня подчеркивает тот факт, что производители оборудования продолжают вкладывать значительные средства в разработку устройств с такими функциями.
С технологической точки зрения, коммутатор локальных сетей представляет собой устройство, основное назначение которого - максимальное ускорение передачи данных за счет параллельно существующих потоков между узлами сети. В этом - его главное отличие от других традиционных устройств локальных сетей – концентраторов (Hub), предоставляющих всем потокам данных сети всего один канал передачи данных.
Коммутатор позволяет передавать параллельно несколько потоков данных c максимально возможной для каждого потока скоростью. Эта скорость ограничена физической спецификацией протокола, которую также часто называют "скоростью провода". Это возможно благодаря наличию в коммутаторе большого числа центров обработки и продвижения кадров и шин передачи данных.
Коммутаторы локальных сетей в своем основном варианте, ставшем классическим уже с начала 90-х годов, работают на втором уровне модели OSI, применяя свою высокопроизводительную параллельную архитектуру для продвижения кадров канальных протоколов. Другими словами, ими выполняются алгоритмы работы моста, описанные в стандартах IEEE 802.1D и 802.1H. Также они имеют и много других дополнительных функций, часть которых вошла в новую редакцию стандарта 802.1D-1998, а часть остается пока не стандартизованной.
Коммутаторы ЛВС отличаются большим разнообразием возможностей и, следовательно, цен - стоимость 1 порта колеблется в диапазоне от 50 до 1000 долларов. Одной из причин столь больших различий является то, что они предназначены для решения различных классов задач. Коммутаторы высокого класса должны обеспечивать высокую производительность и плотность портов, а также поддерживать широкий спектр функций управления. Простые и дешевые коммутаторы имеют обычно небольшое число портов и не способны поддерживать функции управления. Одним из основных различий является используемая в коммутаторе архитектура. Поскольку большинство современных коммутаторов работают на основе патентованных контроллеров ASIC, устройство этих микросхем и их интеграция с остальными модулями коммутатора (включая буферы ввода-вывода) играет важнейшую роль. Контроллеры ASIC для коммутаторов ЛВС делятся на 2 класса - большие ASIC, способные обслуживать множество коммутируемых портов (один контроллер на устройство) и небольшие ASIC, обслуживающие по несколько портов и объединяемые в матрицы коммутации.
Существует 3 варианта архитектуры коммутаторов:
- переключение (cross-bar) с буферизацией на входе,
- самомаршрутизация (self-route) с разделяемой памятью
- высокоскоростная шина.
На рисунке 3 показана блок-схема коммутатора с архитектурой, используемой для поочередного соединения пар портов. В любой момент такой коммутатор может обеспечить организацию только одного соединения (пара портов). При невысоком уровне трафика не требуется хранение данных в памяти перед отправкой в порт назначения - такой вариант называется коммутацией на лету cut-through. Однако, коммутаторы cross-bar требуют буферизации на входе от каждого порта, поскольку в случае использования единственно возможного соединения коммутатор блокируется (рисунок 4). Несмотря на малую стоимость и высокую скорость продвижения на рынок, коммутаторы класса cross-bar слишком примитивны для эффективной трансляции между низкоскоростными интерфейсами Ethernet или token ring и высокоскоростными портами ATM и FDDI.


Коммутаторы с разделяемой памятью имеют общий входной буфер для всех портов, используемый как внутренняя магистраль устройства (backplane). Буферизагия данных перед их рассылкой (store-and-forward - сохранить и переслать) приводит к возникновению задержки. Однако, коммутаторы с разделяемой памятью, как показано на рисунке 5 не требуют организации специальной внутренней магистрали для передачи данных между портами, что обеспечивает им более низкую цену по сравнению с коммутаторами на базе высокоскоростной внутренней шины.

На рисунке 6 показана блок-схема коммутатора с высокоскоростной шиной, связывающей контроллеры ASIC. После того, как данные преобразуются в приемлемый для передачи по шине формат, они помещаются на шину и далее передаются в порт назначения. Поскольку шина может обеспечивать одновременную (паралельную) передачу потока данных от всех портов, такие коммутаторы часто называют "неблокируемыми" (non-blocking) - они не создают пробок на пути передачи данных.

Применение аналогичной параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня модели OSI.
Коммутация третьего уровня
В продолжении темы о технологиях коммутации рассмотренных в предыдущем номера повторим, что применение параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня. Это позволило существенно, в 10-100 раз повысить скорость маршрутизации по сравнению с традиционными маршрутизаторами, в которых один центральный универсальный процессор выполняет программное обеспечение маршрутизации.
По определению Сетевой уровень (третий) - это комплексный уровень, который обеспечивает возможность соединения и выбор маршрута между двумя конечными системами, подключенными к разным "подсетям", которые могут находиться в разных географических пунктах. В данном случае "подсеть" это, по сути, независимый сетевой кабель (иногда называемый сегментом).
Коммутация на третьем уровне - это аппаратная маршрутизация. Традиционные маршрутизаторы реализуют свои функции с помощью программно-управляемых процессоров, что будем называть программной маршрутизацией. Традиционные маршрутизаторы обычно продвигают пакеты со скоростью около 500000 пакетов в секунду. Коммутаторы третьего уровня сегодня работают со скоростью до 50 миллионов пакетов в секунду. Возможно и дальнейшее ее повышение, так как каждый интерфейсный модуль, как и в коммутаторе второго уровня, оснащен собственным процессором продвижения пакетов на основе ASIC. Так что наращивание количества модулей ведет к наращиванию производительности маршрутизации. Использование высокоскоростной технологии больших заказных интегральных схем (ASIC) является главной характеристикой, отличающей коммутаторы третьего уровня от традиционных маршрутизаторов. Коммутаторы 3-го уровня делятся на две категории: пакетные (Packet-by-Packet Layer 3 Switches, PPL3) и сквозные (Cut-Through Layer 3 Switches, CTL3). PPL3 - означает просто быструю маршрутизацию (Рисунок_7). CTL3 – маршрутизацию первого пакета и коммутацию всех остальных (Рисунок 8).

У коммутатора третьего уровня, кроме реализации функций маршрутизации в специализированных интегральных схемах, имеется несколько особенностей, отличающих их от традиционных маршрутизаторов. Эти особенности отражают ориентацию коммутаторов 3-го уровня на работу, в основном, в локальных сетях, а также последствия совмещения в одном устройстве коммутации на 2-м и 3-м уровнях:
- поддержка интерфейсов и протоколов, применяемых в локальных сетях,
- усеченные функции маршрутизации,
- обязательная поддержка механизма виртуальных сетей,
- тесная интеграция функций коммутации и маршрутизации, наличие удобных для администратора операций по заданию маршрутизации между виртуальными сетями.
Наиболее "коммутаторная" версия высокоскоростной маршрутизации выглядит следующим образом (рисунок 9). Пусть коммутатор третьего уровня построен так, что в нем имеется информация о соответствии сетевых адресов (например, IP-адресов) адресам физического уровня (например, MAC-адресам) Все эти МАС-адреса обычным образом отображены в коммутационной таблице, независимо от того, принадлежат ли они данной сети или другим сетям.

Первый коммутатор, на который поступает пакет, частично выполняет функции маршрутизатора, а именно, функции фильтрации, обеспечивающие безопасность. Он решает, пропускать или нет данный пакет в другую сеть Если пакет пропускать нужно, то коммутатор по IP-адресу назначения определяет МАС-адрес узла назначения и формирует новый заголовок второго уровня с найденным МАС-адресом. Затем выполняется обычная процедура коммутации по данному МАС-адресу с просмотром адресной таблицы коммутатора. Все последующие коммутаторы, построенные по этому же принципу, обрабатывают данный кадр как обычные коммутаторы второго уровня, не привлекая функций маршрутизации, что значительно ускоряет его обработку. Однако функции маршрутизации не являются для них избыточными, поскольку и на эти коммутаторы могут поступать первичные пакеты (непосредственно от рабочих станций), для которых необходимо выполнять фильтрацию и подстановку МАС-адресов.
Это описание носит схематический характер и не раскрывает способов решения возникающих при этом многочисленных проблем, например, проблемы построения таблицы соответствия IP-адресов и МАС-адресов
Примерами коммутаторов третьего уровня, работающих по этой схеме, являются коммутаторы SmartSwitch компании Cabletron. Компания Cabletron реализовала в них свой протокол ускоренной маршрутизации SecureFast Virtual Network, SFVN.
Для организации непосредственного взаимодействия рабочих станций без промежуточного маршрутизатора необходимо сконфигурировать каждую из них так, чтобы она считала собственный интерфейс маршрутизатором по умолчанию. При такой конфигурации станция пытается самостоятельно отправить любой пакет конечному узлу, даже если этот узел находится в другой сети. Так как в общем случае (см. рисунок 10) станции неизвестен МАС-адрес узла назначения, то она генерирует соответствующий ARP-запрос, который перехватывает коммутатор, поддерживающий протокол SFVN. В сети предполагается наличие сервера SFVN Server, являющегося полноценным маршрутизатором и поддерживающего общую ARP-таблицу всех узлов SFVN-сети. Сервер возвращает коммутатору МАС-адрес узла назначения, а коммутатор, в свою очередь, передает его исходной станции. Одновременно сервер SFVN передает коммутаторам сети инструкции о разрешении прохождения пакета с МАС-адресом узла назначения через границы виртуальных сетей. Затем исходная станция передает пакет в кадре, содержащем МАС-адрес узла назначения. Этот кадр проходит через коммутаторы, не вызывая обращения к их блокам маршрутизации. Отличие протокола SFVN компании Cabletron от - описанной выше общей схемы в том, что для нахождения МАС-адреса по IP-адресу в сети используется выделенный сервер.
Протокол Fast IP компании 3Com является еще одним примером реализации подхода с отображением IP-адреса на МАС-адрес. В этом протоколе основными действующими лицами являются сетевые адаптеры (что не удивительно, так как компания 3Com является признанным лидером в производстве сетевых адаптеров Ethernet) С одной стороны, такой подход требует изменения программного обеспечения драйверов сетевых адаптеров, и это минус Но зато не требуется изменять все остальное сетевое оборудование.
При необходимости передать пакет узлу назначения другой сети, исходный узел в соответствии с технологией Fast IP должен передать запрос по протоколу NHRP (Next Hop Routing Protocol) маршрутизатору сети. Маршрутизатор переправляет этот запрос узлу назначения, как обычный пакет Узел назначения, который также поддерживает Fast IP и NHRP, получив запрос, отвечает кадром, отсылаемым уже не маршрутизатору, а непосредственно узлу-источнику (по его МАС-адресу, содержащемуся в NHRP-запросе). После этого обмен идет на канальном уровне на основе известных МАС-адресов. Таким образом, снова маршрутизировался только первый пакет потока (как на рисунке 9 кратковременный поток), а все остальные коммутировались (как на рисунке 9 долговременный поток).
Еще один тип коммутаторов третьего уровня — это коммутаторы, работающие с протоколами локальных сетей типа Ethernet и FDDI. Эти коммутаторы выполняют функции маршрутизации не так, как классические маршрутизаторы. Они маршрутизируют не отдельные пакеты, а потоки пакетов.
Поток — это последовательность пакетов, имеющих некоторые общие свойства. По меньшей мере, у них должны совпадать адрес отправителя и адрес получателя, и тогда их можно отправлять по одному и тому же маршруту. Если классический способ маршрутизации использовать только для первого пакета потока, а все остальные обрабатывать на основании опыта первого (или нескольких первых) пакетов, то можно значительно ускорить маршрутизацию всего потока.
Рассмотрим этот подход на примере технологии NetFlow компании Cisco, реализованной в ее маршрутизаторах и коммутаторах. Для каждого пакета, поступающего на порт маршрутизатора, вычисляется хэш-функция от IP-адресов источника, назначения, портов UDP или TCP и поля TOS, характеризующего требуемое качество обслуживания. Во всех маршрутизаторах, поддерживающих данную технологию, через которые проходит данный пакет, в кэш-памяти портов запоминается соответствие значения хэш-функции и адресной информации, необходимой для быстрой передачи пакета следующему маршрутизатору. Таким образом, образуется квазивиртуальный канал (см. Рисунок 11), который позволяет быстро передавать по сети маршрутизаторов все последующие пакеты этого потока. При этом ускорение достигается за счет упрощения процедуры обработки пакета маршрутизатором - не просматриваются таблицы маршрутизации, не выполняются ARP-запросы.
Этот прием может использоваться в маршрутизаторах, вообще не поддерживающих коммутацию, а может быть перенесен в коммутаторы. В этом случае такие коммутаторы тоже называют коммутаторами третьего уровня. Примеров маршрутизаторов, использующих данный подход, являются маршрутизаторы Cisco 7500, а коммутаторов третьего уровня — коммутаторы Catalyst 5000 и 5500. Коммутаторы Catalyst выполняют усеченные функции описанной схемы, они не могут обрабатывать первые пакеты потоков и создавать новые записи о хэш-функциях и адресной информации потоков. Они просто получают данную информацию от маршрутизаторов 7500 и обрабатывают пакеты уже распознанных маршрутизаторами потоков.
Выше был рассмотрен способ ускоренной маршрутизации, основанный на концепции потока. Его сущность заключается в создании квазивиртуальных каналов в сетях, которые не поддерживают виртуальные каналы в обычном понимании этого термина, то есть сетях Ethernet, FDDI, Token Ring и т п. Следует отличать этот способ от способа ускоренной работы маршрутизаторов в сетях, поддерживающих технологию виртуальных каналов — АТМ, frame relay, X 25. В таких сетях создание виртуального канала является штатным режимом работы сетевых устройств. Виртуальные каналы создаются между двумя конечными точками, причем для потоков данных, требующих разного качества обслуживания (например, для данных разных приложений) может создаваться отдельный виртуальный канал. Хотя время создания виртуального канала существенно превышает время маршрутизации одного пакета, выигрыш достигается за счет последующей быстрой передачи потока данных по виртуальному каналу. Но в таких сетях возникает другая проблема — неэффективная передача коротких потоков, то есть потоков, состоящих из небольшого количества пакетов (классический пример — пакеты протокола DNS).
Накладные расходы, связанные с созданием виртуального канала, приходящиеся на один пакет, снижаются при передаче объемных потоков данных. Однако они становятся неприемлемо высокими при передаче коротких потоков. Для того чтобы эффективно передавать короткие потоки, предлагается следующий вариант, при передаче нескольких первых пакетов выполняется обычная маршрутизация. Затем, после того как распознается устойчивый поток, для него строится виртуальный канал, и дальнейшая передача данных происходит с высокой скоростью по этому виртуальному каналу. Таким образом, для коротких потоков виртуальный канал вообще не создается, что и повышает эффективность передачи.
По такой схеме работает ставшая уже классической технология IP Switching компании Ipsilon. Для того чтобы сети коммутаторов АТМ передавали бы пакеты коротких потоков без установления виртуального канала, компания Ipsilon предложила встроить во все коммутаторы АТМ блоки IP-маршрутизации (рисунок 12), строящие обычные таблицы маршрутизации по обычным протоколам RIP и OSPF.
Компания Cisco Systems выдвинула в качестве альтернативы технологии IP Switching свою собственную технологию Tag Switching, но она не стала стандартной. В настоящее время IETF работает над стандартным протоколом обмена метками MPLS (Multi-Protocol Label Switching), который обобщает предложение компаний Ipsilon и Cisco, а также вносит некоторые новые детали и механизмы. Этот протокол ориентирован на поддержку качества обслуживания для виртуальных каналов, образованных метками.
Коммутация четвертого уровня
Свойства четвертого или транспортного уровня модели OSI следующие: транспортный уровень обеспечивает услуги по транспортировке данных. В частности, заботой транспортного уровня является решение таких вопросов, как выполнение надежной транспортировки данных через объединенную сеть. Предоставляя надежные услуги, транспортный уровень обеспечивает механизмы для установки, поддержания и упорядоченного завершения действия виртуальных каналов, систем обнаружения и устранения неисправностей транспортировки и управления информационным потоком (с целью предотвращения переполнения данными из другой системы).
Некоторые производители заявляют, что их системы могут работать на втором, третьем и даже четвертом уровнях. Однако рассмотрение описания стека TCP/IP (рисунок 1), а также структуры пакетов IP и TCP (рисунки 2, 3), показывает, что коммутация четвертого уровня является фикцией, так как все относящиеся к коммутации функции осуществляются на уровне не выше третьего. А именно, термин коммутация четвертого уровня с точки зрения описания стека TCP/IP противоречий не имеет, за исключением того, что при коммутации должны указываться адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя. Пакеты TCP имеют поля локальный порт отправителя и локальный порт получателя (рисунок 3), несущие смысл точек входа в приложение (в программу), например Telnet с одной стороны, и точки входа (в данном контексте инкапсуляции) в уровень IP. Кроме того, в стеке TCP/IP именно уровень TCP занимается формированием пакетов из потока данных идущих от приложения. Пакеты IP (рисунок 2) имеют поля адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя и следовательно могут наряду с MAC адресами использоваться для коммутации. Тем не менее, название прижилось, к тому же практика показывает, что способность системы анализировать информацию прикладного уровня может оказаться полезной — в частности для управления трафиком. Таким образом, термин "зависимый от приложения" более точно отражает функции так называемых коммутаторов четвертого уровня.


Тематики
EN
Русско-английский словарь нормативно-технической терминологии > технология коммутации
См. также в других словарях:
Управления система с переменной структурой — Адаптивное управление совокупность методов теории управления, позволяющих синтезировать системы управления, которые имеют возможность изменять параметры регулятора или структуру регулятора в зависимости от изменения параметров объекта управления … Википедия
Система управления — Структура управления систематизированный (строго определенный) набор средств сбора сведений о подконтрольном объекте и средств воздействия на его поведение с целью достижения определённых целей. Объектом системы управления могут быть как… … Википедия
ГОСТ 19176-85: Системы управления техническими средствами корабля. Термины и определения — Терминология ГОСТ 19176 85: Системы управления техническими средствами корабля. Термины и определения оригинал документа: 14. Аварийное управление техническими средствами корабля Управление по аварийным сигналам выхода из строя технических… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 50030.1-2000: Аппаратура распределения и управления низковольтная. Часть 1. Общие требования и методы испытаний. — Терминология ГОСТ Р 50030.1 2000: Аппаратура распределения и управления низковольтная. Часть 1. Общие требования и методы испытаний. оригинал документа: 2.2.11 автоматический выключатель : Контактный коммутационный аппарат, способный включать,… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 50030.1-2007: Аппаратура распределения и управления низковольтная. Часть 1. Общие требования — Терминология ГОСТ Р 50030.1 2007: Аппаратура распределения и управления низковольтная. Часть 1. Общие требования оригинал документа: 2.2.11 автоматический выключатель: Контактный коммутационный аппарат, способный включать, проводить и отключать… … Словарь-справочник терминов нормативно-технической документации
Пульт дистанционного управления — Пульт ДУ (ПДУ, пульт дистанционного управления; RCU, англ. remote control unit) электронное устройство для удалённого (дистанционного) управления другим электронным устройством на расстоянии. Существуют как в автономном, так и в… … Википедия
автоматизированная система управления — автоматизированная система, управляющая АСУ Управляющая система, часть функций которой, главным образом функцию принятия решений, выполняет человек оператор. Примечание В зависимости от объектов управления различают, например: АСУ П, когда… … Справочник технического переводчика
протокол управления простой сетью — Протокол, управляющий сетью, сетевыми устройствами и их функциями. [Е.С.Алексеев, А.А.Мячев. Англо русский толковый словарь по системотехнике ЭВМ. Москва 1993] простой протокол сетевого управления Прикладной протокол (L7) управления сетевыми… … Справочник технического переводчика
ПУЛЬТ УПРАВЛЕНИЯ — (англ. control panel) совокупность средств отображения (см. Панель информации) и органов управления, объединенных в систему в соответствии со структурой управляемого объекта, задачами оператора и с учетом психофизиологических характеристик… … Большая психологическая энциклопедия
Автоматизированная система управления (АСУ) — (automated, automatized control system (ACS), computerized control system, management information system (MIS)) система управления, в которой применяются современные автоматические средства обработки данных и экономико математические методы для… … Экономико-математический словарь
Элемент системы автоматического управления или регулирования — Составная часть схемы, которая имеет единую конструкцию, разъемное соединение, выполняет в изделии одну или несколько определенных функций (усиление, преобразование, генерирование, формирование сигналов) и требует проверки на стенде или в… … Словарь-справочник терминов нормативно-технической документации